
{kind=link}
Self-driving cars may have to ‘adapt’ to share roads safely with runners, according to a study led by researchers from the University of Glasgow.
A new study on how runners may choose to interact with self-driving vehicles is challenging assumptions on how automated vehicles will navigate safely on the roads of the future.
Researchers at the University of Glasgow and KAIST in South Korea led the study, which used augmented reality tech to explore for the first time how runners’ behaviour differs from walkers when they are crossing roads and junctions.
Their research revealed that runners are much more likely to take risks when negotiating traffic than walkers are. During the study, the runners often took less time to process the road conditions around them and sometimes chose to run ahead of oncoming cars in order to maintain their target pace. On several occasions, they were ‘struck’ by virtual vehicles in the team’s simulated road tests.
The team’s findings could help develop better safety systems for automated vehicles, or AVs, which have largely been trained to expect the people around them to behave much more cautiously while walking.
Ammar Al-Taie, one of the researchers, said: “I’m a runner myself, and I’ve noticed that crossing roads while running feels different than when I’m walking. I’m much more motivated to keep moving because slowing to let a car pass and accelerating again takes a real physical effort. Paired with that is an increased mental effort of trying to process what’s around me as I’m running, and judging whether it’s safe for me to keep going at my current pace.
“In this study, we found evidence to suggest these are common feelings for runners, and that they do seem more tolerant of risk if it helps them keep moving. That makes them a riskier class of road user for self-driving cars to deal with, and suggests that more needs to be done to test self-driving cars with runners as well as walkers, and to find new ways to facilitate communication between cars and people.”
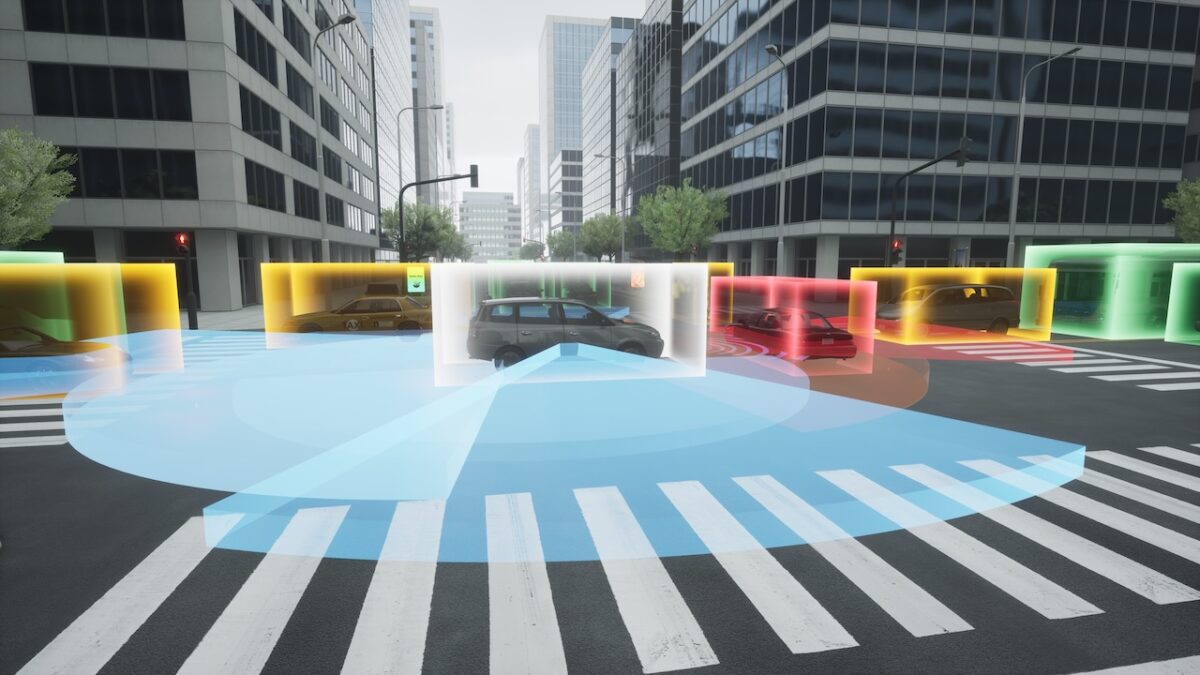
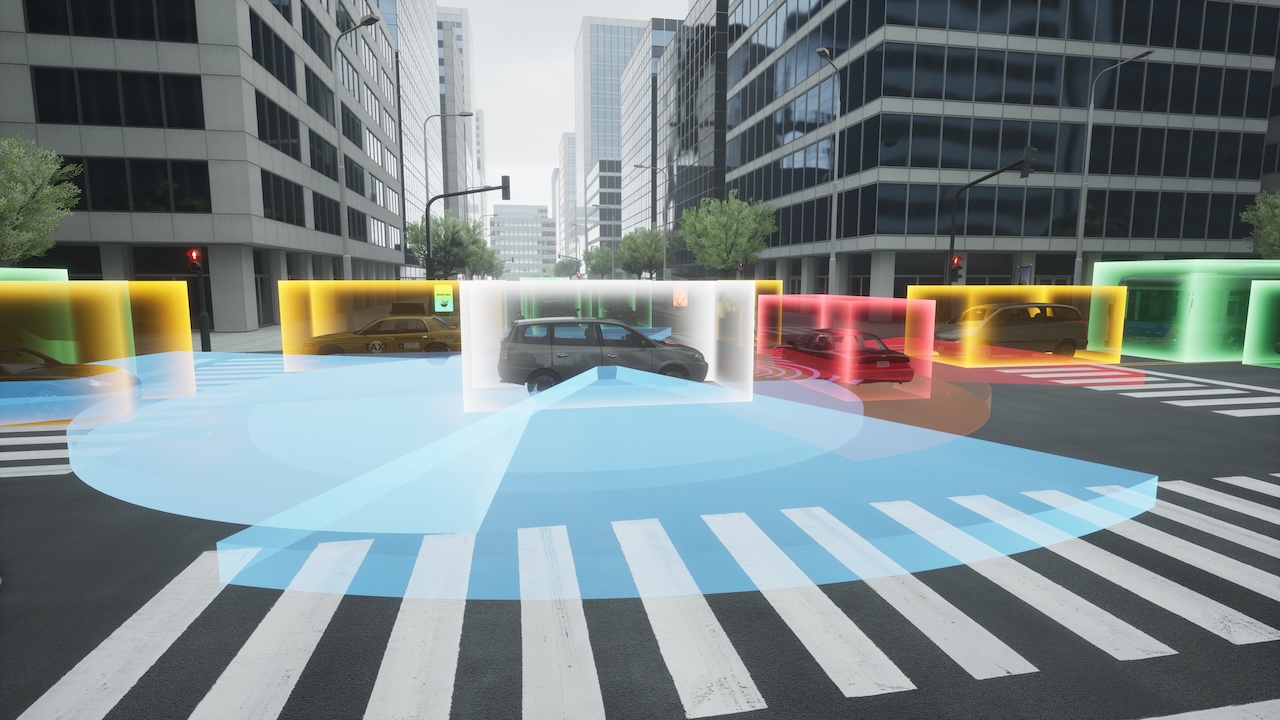
The team suggest that displays of lights on the exteriors of cars called ‘external Human-Machine Interfaces’, or eHMIs, could enable them to communicate their intentions more quickly and effectively.
Well-designed eHMIs could replace the usual non-verbal cues like waves, eye movements, and deceleration which human drivers currently use to show people around them how they intend to proceed. Based on their research, the team suggest an eHMI design called DualBeam, which uses new types of lights on the vehicle to help runners make swift but well-informed crossing decisions.
Professor Stephen Brewster, of the University of Glasgow’s School of Computing Science said: “In our research group, we’ve been working for several years now on developing eHMIs which could help self-driving cars share the roads safely with vulnerable road users such as cyclists. In doing so, we realised that there’s been very little research into how runners might expect to interact with driverless cars.
“That’s surprising on a couple of levels. One is that running is the most popular physical activity in the world, with more than 600 million people estimated to run recreationally. The other is that self-driving car journeys are booming, with a million AV trips a month in the USA alone. Clearly, it will be increasingly important to ensure that runners and AVs can share the roads safely in the years to come. We were keen to explore how self-driving cars could use eHMIs to speak the language of runners as well as bike riders to help maximise road safety.”